- Published on
- |Views: 136|4 min read
On agentic coding, friction, and learning
- Authors

- Name
- Shashank Shekhar
- @sshkhr16
I've been actively thinking about how to use agentic coding workflows with <insert tool of choice from Claude Code, OpenAI Codex, Google Antigravity, OpenCode, PiCode, ... > in a way that enables two conflicting goals for me:
- Delivering features, outcomes and projects/products as fast as possible
- Learning new, usually technically involved concepts, like distributed training, inference, GPU kernels, post-training algorithms etc.
The former requires me to fully embrace giving up autonomy, reducing interactions where I verify plans or outputs and have to click through "Yes/Allow". After all, I can hardly produce 60 tokens/sec, let alone review them them.
But the latter involves me to carefully impelment and evaluate algorithms, benchmarks, observe training dynamics etc. And I have found that while I am able to better leverage agents with all the bells and whistles now available at my disposal, they can't do as good of a job at this as me (occassionally) or my best collaborators (more often).
Weak-to-Strong Generalization
The biggest issue I have with agents is that I am not able to achieve Weak-to-Strong generalization at research engineering capabilities by using agents. Or anyone can. This tweet captures my thoughts on this more viscerally:
Obviously as a fan of the concept of lobotomized minions performing work all night for me, I want to get in on this “my Claude agent ran all night!” action
— annie (@soychotic) April 16, 2026
Problem is I have no clue what the hell you guys are building for 8 hrs that doesn’t need manual intervention at any point
I am quite happy using agents on tasks I have limited expertise in e.g. web-dev, or a lot of scaffolding etc. I know for a fact that they will do it better and faster than me. But the kind of tasks I do on a day-to-day are often more involved, and I find that agents are not really that helpful outside of discovery and scaffolding. And to make them really helpful, a lot of work goes into designing the proper guardrails with skills, spec-driven-development, test-driven-development. And while I am building out the agent harness doing this, I am missing out on building this harness for myself by internalizing these concepts.
Two Types of Friction
I've settled on a similar philosophy as Mario Zechner, the creator of the modular Pi Agent, which powers the viral slop machine OpenClaw. I'd encourage you to watch his full Building pi in a World of Slop talk at the AI Engineer Europe conference. But I will tell you about my key takeaway from it regarding my conundrum.
I have realized that friction during development falls into two buckets for me:
- Operational friction, the type that involves mundane but time-consuming parts. This falls under the umbrella of points 3 and 4 in Mario's slides.
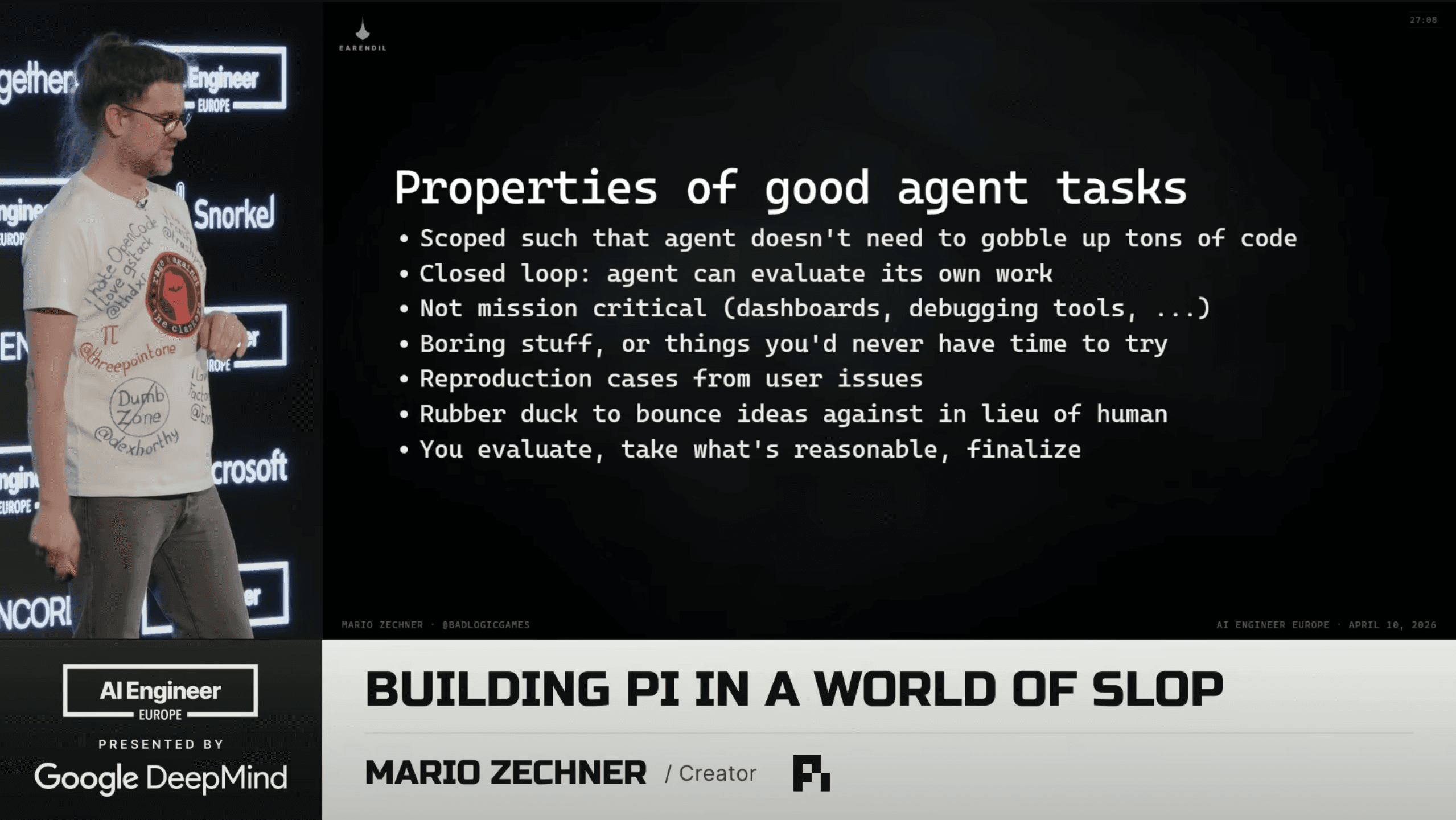
I partially agree with the note on well-scoped and verifiable tasks for agents. I am more selective on passing these to the agents, because sometimes the scoping was done with an agent's input and I may or may not understand the legitimacy of the scoping requirements. And then implementing a well-validate task uncovers holes in my own understanding.
- I was trying to come up with a short phrase for the other type of friction, but the best I came up with is "Friction from operating at the boundary of your cognitive abilities". These could be knowledge, understanding, ability to synthesize new information, or some combination of those.
Being a knowledge worker (research scientist in the past, research engineer now) I really enjoy this time of friction - it helps me expand my capabilities, and I also think this is sort of learning is the long-tail of model and agent abilities which I'm not convinced our current training paradigms can solve for.
In Mario's words (this type of) "friction builds understanding and taste".
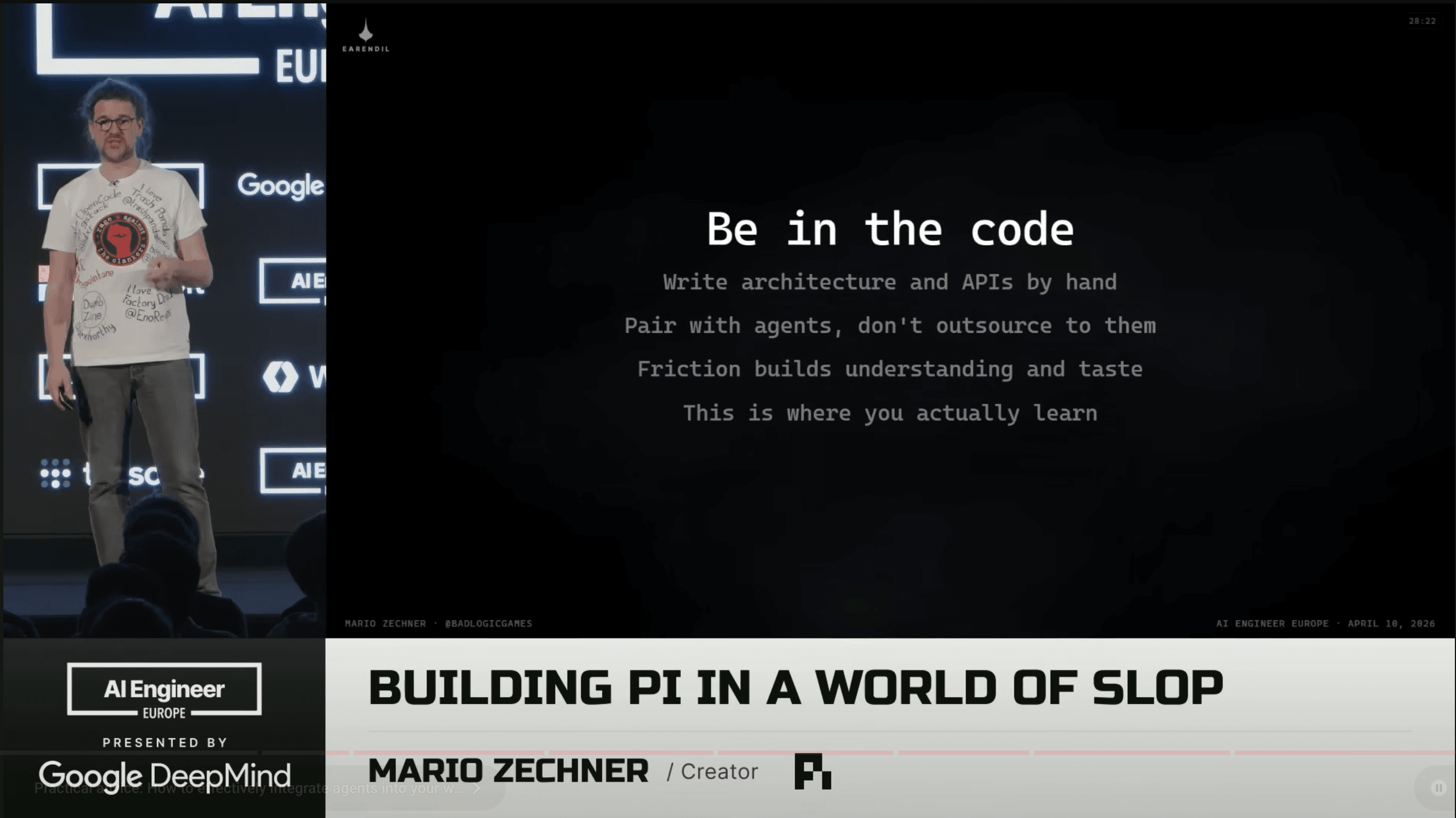
I agree.